題名通り、色々とやっています。
inrof
さて、アルミ切るかーと頑張っていたら指を怪我しました。もうほぼ治りましたし、大したことはないですが、ここ4日くらいはアルミの切断はできませんでした。
ただ、班員にカバーしてもらい、かなり進みました。山田君3号改(仮)のハードは、かなり出来てきました。あとPSD固定用の板1枚、吸引機構のアルミアングル1本が出来れば、組み立てて完成なはずです。今度こそ、色々とハードが致命的だった3号が、動いてくれると信じています。ここまで進捗が早いのは班員のおかげです。感謝してます。
また、もう一台の班員に頼んだ回路も昨日の段階でかなり進んでいて、嬉しいです。
あと、zigbeeを少し実験して見ました。RXでZigbeeをコントロールして通信することが、簡単なデジタル信号なら出来ました。ただ、5V系であるSHとZigbeeはちょっとうまくいっていません…。レベル変換がうまくいっていないのかな?難しいですね。
吸引用の電池、Li-po1Sにしようかなと考えてみる、今日この頃です。
マイクロマウス
設計が 、終わりが見えてきました。僕は流体力学については全然分からないので、ファンとかもはや勘で描いていますが…。あと、Li-poの容量もどれくらいが良いのか、掴めていないです。といってもあとセンサの位置とモータのコネクタの位置、一次スカートあたりを設計すれば終了かと思われます。そろそろ部品集めも動き出しましょうかね。
そろそろ1月も終わりですね。お、今年まだ身体崩してないですね。良い感じです。今後も自制しつつ、メリハリつけてやろうと思います。
今日はこの辺で。
2017年1月24日火曜日
色々と前に進みました
お久しぶりです。身体を崩したわけではなく、単に更新を忘れていただけです。


少し時間があったため、色々と進めました。以下進捗報告です。
inrof
SHの方のマイコンボードは、少し配線漏れがありましたが、一応動くようになりました。
それと、動作確認終了までかなり苦戦しましたが、こんなものが出来ました。

もう1台目のマイコンボードです。見れば分かりますが、RX621を使っています。インターフェイスを強くしようとしたばかりに、裏の配線は地獄を見ました。足の折れたチップトランジスタにUEW付けるとか、もうやりたくないです。7セグを表裏間違えていて…。どうにか回路が動くことは確認できました。
RX621に関しては…Lチカできました!CS+,RFPを導入しました。RFPの書き込みの速さに驚きました。というか今HEWとFDTとか時代遅れ感がありますが…。
ところで、SHとRX、データシートを見るとMTU2が両方ともありますよね。一見同じように書けば良いのかと思いきや、なんかフラグの立ち方とか微妙に違うのですよね…。ということでまだ割り込みなんて高度なことはできていません。
inrofはそんな感じです。
マイクロマウス
設計が、だいぶ進みました。また、部品集めも足回りや、吸引モータなどは大体手に入れました。こんなマウスが、本当に動くといいですね〜。
それっぽくなってきました
アルミ材も入手したので、今後は山田君3号のハードウェアを作り直そうと思います。剛性を上げること、水平を保つこと、重心など意識して改良型を作ります。底面、PSDのあたりは絶対直します。アームも前のは高重心過ぎたので、サーボの位置を少し前にして改良したいです。吸引力不足も若干感じたので、余裕があればそこも直したいですが…(モータの選定とか)、少し時間がないかもです。
とはいえ、よく言っていますが、体調第一で。こうやっていい感じに進んでいくとついつい作業をし過ぎて燃え尽きることがあるので、自制しつつ、気楽にやっていこうと思います。
今日はこの辺で。
とはいえ、よく言っていますが、体調第一で。こうやっていい感じに進んでいくとついつい作業をし過ぎて燃え尽きることがあるので、自制しつつ、気楽にやっていこうと思います。
今日はこの辺で。
2017年1月15日日曜日
オフシーズンかな?
ようやく大会オフシーズンですね。といっても、今年は2、3月がロボット以外でかなり忙しくなると考えられるので、余裕なのかは、分かりませんが…。
進捗は、
inrof
3号(吸引機の方)のマイコンボードに色々と問題があったので、作り直しました。動作確認はまだなので、近々しようと思っています。
4号(予定)の回路も、班員に頼みました。あと3号のファン用電池を班員に増量してもらっています。
僕の方はそろそろRX621をそれなりに使えるようにならないとなーという感じです。あとzigbeeも。とりあえずブレッドボードあたりで回路組んでテストしたいと思っています。
班員には、上記の作業が終わり次第、あと僕が材料を集め次第、3号のアルミ加工をしてもらいたいなぁという感じです。まぁ、焦ることはまだないので、各自のペースで、というスタンスでいきたいです。
マイクロマウス
設計中です。とりあえず足回りが6割くらい出来てきたので、次はモータマウントです。部品集めも、1つの重要な工程ですかね。
今は部品が色々と足りないので、今度揃えないとなーという感じです。アルミ板、シム、ファンモータ、などなど。あと、ものづくり支援の部品も決めていかなくてはですね。まぁ、オフシーズンですし、ゆったりやって行こうかなと思います。身体を崩さないことも、今年の目標の一つなので。
今日はこの辺で。
進捗は、
inrof
3号(吸引機の方)のマイコンボードに色々と問題があったので、作り直しました。動作確認はまだなので、近々しようと思っています。
4号(予定)の回路も、班員に頼みました。あと3号のファン用電池を班員に増量してもらっています。
僕の方はそろそろRX621をそれなりに使えるようにならないとなーという感じです。あとzigbeeも。とりあえずブレッドボードあたりで回路組んでテストしたいと思っています。
班員には、上記の作業が終わり次第、あと僕が材料を集め次第、3号のアルミ加工をしてもらいたいなぁという感じです。まぁ、焦ることはまだないので、各自のペースで、というスタンスでいきたいです。
マイクロマウス
設計中です。とりあえず足回りが6割くらい出来てきたので、次はモータマウントです。部品集めも、1つの重要な工程ですかね。
今は部品が色々と足りないので、今度揃えないとなーという感じです。アルミ板、シム、ファンモータ、などなど。あと、ものづくり支援の部品も決めていかなくてはですね。まぁ、オフシーズンですし、ゆったりやって行こうかなと思います。身体を崩さないことも、今年の目標の一つなので。
今日はこの辺で。
2017年1月11日水曜日

2017年1月8日日曜日
ものづくりチャレンジ参加
ものづくりチャレンジに行って来ました。
まずは、参加者並びに運営、審査員の方々、お疲れ様でした。運営はスムーズで、良かったと思います。控え室も多分僕が参加したロボコンの中で1番広く、快適でした。
で、僕の方はと言いますと…
まさかの、決勝進出&技術賞でした。
Q.ダメでしたと昨日行っていたのでは…?
A.本番になると元気になるみたいです。
冗談はさておき、時間の流れに沿っていつも通り大会報告をしようと思います。
まず、会場に入り、試走してみました。昨日の段階とほぼ同じで、全然ダメでした。ピークずれまくっていました。
動かないのだし、思い付いたらどんどん変えて行こうというスタンスで、プログラムの方をいじって行きました。下がる距離をあげたり、探しに行く距離を減らしたりしました。
何度もやって行くうちに、測距モジュールの角度がずれていて死角が出来ているのでは?と思ったので思い切って右の測距のアルミ板をぐいぐいして内側に曲げてみました。少しはマシになったか?という状態でした。調整はそんな感じでした。
その後はまず、本番台での試走がありました。時間を区切っているとはいえ、本番の状態を見れるのは助かります。まぁ、ラインを見失いがちですね〜という感じ。純粋に進んだ距離戻るだけなので、ボールに乗り上げようもんなら復帰は不可能です。結果は、よく覚えていませんが5,6個落とせていたか?というくらいでした。この段階で、ああよく動いているじゃんという印象でした。
もう調整はいいやと思い、適当に参加者と交流したりご飯を食べたりして、予選となりました。
さて、予選です。くじで決めたのですが、バッチリ11チーム中1番を引きました。他がどの程度でくるかがわかりませんが、まぁやりたいようにやって行こうという感じでした。諦めていたので、そんなに緊張はしませんでした。
競技開始…最初2個ほど落とした後探索を失敗→クロスラインを間違えてライントレースしバイバイしてしまいました。残り4分はあったので、リトライを取りました。
競技再開…探索はミスる時はミスるがラインからは外れず、なんかそれなりにとって行く…時間が来て、競技終了。あれ、9個+自由ボールで32点?信じられませんでした。なぜそんなに動いたのでしょうか。時の効果としか言いようがありません。
なんとか上位6チーム入れる決勝に6位で進出しました。審査員点が、安定感のなさからかかなり低かったので、危なかったですが、進んでしまったのは驚きました。そして決勝のくじもまた1番をとってしまうというミラクルを起こしました。今日、試走、予選、決勝全部1番手でした。やったね(?)。
さて、決勝。最初の8個までは良かったのですが(本当に見落としなくいけていて驚きました)、その後探索ミスにてラインを見失いました。しぶとさで復帰しましたが、位置データが完全に狂い、9個目を落としてから壁に激突しました。残り6分ありましたが、まぁよく動いただろうということで、競技終了としました。予選と同じく32点でした。
その後は観戦しました。大体が昨年の知ロボの改良版だったので、じっくり見たわけではないですが、レベルが高かったですね。
最後、表彰式。決勝に行ったチームには賞が贈られ、僕は技術賞でした。まさかここまで上手く行くとは…という感じでしたが、素直に嬉しかったです。測距モジュールで手をかざすことによるモード変更、物理量べースなど色々と詰めていたので、評価していただけたことは本当に嬉しいです。自分は、「技術的に面白いもの」を作ることを重要視して来ていたので、良かったです。
今回話した方々や、参加者とは次の6月にお会いすることになると思うので、楽しみです。お互い頑張りましょう!今日は、お疲れ様でした。

今日はこの辺で。
まずは、参加者並びに運営、審査員の方々、お疲れ様でした。運営はスムーズで、良かったと思います。控え室も多分僕が参加したロボコンの中で1番広く、快適でした。
で、僕の方はと言いますと…
まさかの、決勝進出&技術賞でした。
Q.ダメでしたと昨日行っていたのでは…?
A.本番になると元気になるみたいです。
冗談はさておき、時間の流れに沿っていつも通り大会報告をしようと思います。
まず、会場に入り、試走してみました。昨日の段階とほぼ同じで、全然ダメでした。ピークずれまくっていました。
動かないのだし、思い付いたらどんどん変えて行こうというスタンスで、プログラムの方をいじって行きました。下がる距離をあげたり、探しに行く距離を減らしたりしました。
何度もやって行くうちに、測距モジュールの角度がずれていて死角が出来ているのでは?と思ったので思い切って右の測距のアルミ板をぐいぐいして内側に曲げてみました。少しはマシになったか?という状態でした。調整はそんな感じでした。
その後はまず、本番台での試走がありました。時間を区切っているとはいえ、本番の状態を見れるのは助かります。まぁ、ラインを見失いがちですね〜という感じ。純粋に進んだ距離戻るだけなので、ボールに乗り上げようもんなら復帰は不可能です。結果は、よく覚えていませんが5,6個落とせていたか?というくらいでした。この段階で、ああよく動いているじゃんという印象でした。
もう調整はいいやと思い、適当に参加者と交流したりご飯を食べたりして、予選となりました。
さて、予選です。くじで決めたのですが、バッチリ11チーム中1番を引きました。他がどの程度でくるかがわかりませんが、まぁやりたいようにやって行こうという感じでした。諦めていたので、そんなに緊張はしませんでした。
競技開始…最初2個ほど落とした後探索を失敗→クロスラインを間違えてライントレースしバイバイしてしまいました。残り4分はあったので、リトライを取りました。
競技再開…探索はミスる時はミスるがラインからは外れず、なんかそれなりにとって行く…時間が来て、競技終了。あれ、9個+自由ボールで32点?信じられませんでした。なぜそんなに動いたのでしょうか。時の効果としか言いようがありません。
なんとか上位6チーム入れる決勝に6位で進出しました。審査員点が、安定感のなさからかかなり低かったので、危なかったですが、進んでしまったのは驚きました。そして決勝のくじもまた1番をとってしまうというミラクルを起こしました。今日、試走、予選、決勝全部1番手でした。やったね(?)。
さて、決勝。最初の8個までは良かったのですが(本当に見落としなくいけていて驚きました)、その後探索ミスにてラインを見失いました。しぶとさで復帰しましたが、位置データが完全に狂い、9個目を落としてから壁に激突しました。残り6分ありましたが、まぁよく動いただろうということで、競技終了としました。予選と同じく32点でした。
その後は観戦しました。大体が昨年の知ロボの改良版だったので、じっくり見たわけではないですが、レベルが高かったですね。
最後、表彰式。決勝に行ったチームには賞が贈られ、僕は技術賞でした。まさかここまで上手く行くとは…という感じでしたが、素直に嬉しかったです。測距モジュールで手をかざすことによるモード変更、物理量べースなど色々と詰めていたので、評価していただけたことは本当に嬉しいです。自分は、「技術的に面白いもの」を作ることを重要視して来ていたので、良かったです。
今回話した方々や、参加者とは次の6月にお会いすることになると思うので、楽しみです。お互い頑張りましょう!今日は、お疲れ様でした。

景品はUSBでした
2017年1月7日土曜日
ダメでした
久々に、大会前にロボットが間に合いませんでした。
探索を調整するも、調整は無駄と確信しました。ピークがずれまくります。これはおそらくハードウェアが原因です。詳しく話すと長くなりそうなので、詳細はまた書きたくなったら書きます。結果、明日のものづくりチャレンジでは色ボールをほとんど得点できないと思います。
短期間にばっと作ったものなので、色々とハードウェアに欠陥がでています。焦りすぎたなと思います。もう少しよく考えて、ゆっくり作るべきだったなぁと思います。
とはいえ、ソフトウェアの方はアルゴリズムは出来たし、前に進んでいないわけではないので、まぁそこまで落ち込む必要はないかなと。最近ロボットが動くことが続いていたので、動かないことに少し動揺していますが、普通に間に合うわけなかったかなと思います。問題もだいぶ掴めてきた気がするので、悪いことではないと思います。まぁ、そんな簡単にはいきませんよね。無意識に、「ロボットは動くのが当然」と考えてしまって、雑でもなんとかなるだろうという変な自信(?)ができてしまったのかもしれませんね。
頭が疲れて来ているので、まぁ思うことはこの辺にして、明日は会場に遅れないこと、周りに迷惑をかけないこと、交流をすることをメインにしようと思います。
今日はこの辺で。
探索を調整するも、調整は無駄と確信しました。ピークがずれまくります。これはおそらくハードウェアが原因です。詳しく話すと長くなりそうなので、詳細はまた書きたくなったら書きます。結果、明日のものづくりチャレンジでは色ボールをほとんど得点できないと思います。
短期間にばっと作ったものなので、色々とハードウェアに欠陥がでています。焦りすぎたなと思います。もう少しよく考えて、ゆっくり作るべきだったなぁと思います。
とはいえ、ソフトウェアの方はアルゴリズムは出来たし、前に進んでいないわけではないので、まぁそこまで落ち込む必要はないかなと。最近ロボットが動くことが続いていたので、動かないことに少し動揺していますが、普通に間に合うわけなかったかなと思います。問題もだいぶ掴めてきた気がするので、悪いことではないと思います。まぁ、そんな簡単にはいきませんよね。無意識に、「ロボットは動くのが当然」と考えてしまって、雑でもなんとかなるだろうという変な自信(?)ができてしまったのかもしれませんね。
頭が疲れて来ているので、まぁ思うことはこの辺にして、明日は会場に遅れないこと、周りに迷惑をかけないこと、交流をすることをメインにしようと思います。
今日はこの辺で。
2017年1月6日金曜日
思うこと
ものづくりチャレンジが明後日…。
現状は…とりあえず、探索以外は良くなりました。ただ、9月の段階で分かっていたように、探索がずれます。距離センサが3つあるので調整が大変な上、なんだか近い時と遠いときでピークの位置がずれている(?)ような気もして、厄介です。まだ色ボールは良くて3、4個くらいしか取れないです。
大会前という感じでついつい焦りがちで、嫌な感じです。というか、よく考えたら新アルゴリズムの実装時間はほんの僅かなのでそう簡単には行かないなというところでしょうか。
車体の方にも、少し限界が見え始めていて、速度も思ったほど出せないなぁという感じです。アルゴリズムも、少しずつ山田君1号の旧アルゴリズムの考え方で行うように書き直していて、なんだかなぁという感じです。やはり山田君1号は色々となんだかんだ良く出来ている気がします。
じゃあ、今作は…。1号のマイナーチェンジのように3号が出来つつあります。そこに少し引っかかるというか…、やはり新しく作るからには何か新しい事をしたいと思いつつ、時間の無さや発想力の無さで、つまらないものになってしまうような気がするのですよね。物理量ベースとか3つのPSDとか吸引とか言っているけれど根本的に1台で行くスタンスが変わっていないですし。今回のinrofは、こういうものを作りたい→参加しよう、という感じではなく、参加しよう→どういう形にしようか?という順で無意識に作っているからか、ありきたりなものになってしまっている気がします。前回はオーソドックスなものを作ってみたいと思い作りましたが、今作は目標を少し無理に立てているのかもしれません。
前回上手くいきすぎた事もあり、上手く行かない、前からあまり変わらないことに焦る自分が居て、それが嫌ですね。やはり楽しむこと、作る事を楽しむ事が良いと思うのです。
だらだら書いてしまいましたが、結局今回のinrofはアイデアが尽きてしまっていることで、無理に目標を立てようとしているのが現状です。と、ブログに書いてみてようやくわかりました。
逆にマイクロマウスは今年は未知の領域だらけなので、モチベーションが高いです。inrofはそこそこ動くようになったら、無理な機能は入れず、安定化を1番に考えて、マウスに時間を割きたいなという思いです。ただ今は安定していないので、探索をなんとかするのが課題でしょうか。少しinrofに理想を求めすぎていたような気がします。純粋に、安定してボールを取れることを出来たらOKにして、速さとか新しいこととかにとらわれない方がいいのかなと思います。柔軟に行こうと思います。とはいえ、去年のアルゴリズムは読みにくい上にミスが多く調整しにくいので、新アルゴリズムは継続します。だいたいできて来ているので。
とりあえず明日は探索を調整してみます。間に合わないでしょうが、まぁやらないと始まらないので。ものづくりチャレンジは交流を広くする事をメインで考えて行こうと思います。
今日はこの辺で。
現状は…とりあえず、探索以外は良くなりました。ただ、9月の段階で分かっていたように、探索がずれます。距離センサが3つあるので調整が大変な上、なんだか近い時と遠いときでピークの位置がずれている(?)ような気もして、厄介です。まだ色ボールは良くて3、4個くらいしか取れないです。
大会前という感じでついつい焦りがちで、嫌な感じです。というか、よく考えたら新アルゴリズムの実装時間はほんの僅かなのでそう簡単には行かないなというところでしょうか。
車体の方にも、少し限界が見え始めていて、速度も思ったほど出せないなぁという感じです。アルゴリズムも、少しずつ山田君1号の旧アルゴリズムの考え方で行うように書き直していて、なんだかなぁという感じです。やはり山田君1号は色々となんだかんだ良く出来ている気がします。
じゃあ、今作は…。1号のマイナーチェンジのように3号が出来つつあります。そこに少し引っかかるというか…、やはり新しく作るからには何か新しい事をしたいと思いつつ、時間の無さや発想力の無さで、つまらないものになってしまうような気がするのですよね。物理量ベースとか3つのPSDとか吸引とか言っているけれど根本的に1台で行くスタンスが変わっていないですし。今回のinrofは、こういうものを作りたい→参加しよう、という感じではなく、参加しよう→どういう形にしようか?という順で無意識に作っているからか、ありきたりなものになってしまっている気がします。前回はオーソドックスなものを作ってみたいと思い作りましたが、今作は目標を少し無理に立てているのかもしれません。
前回上手くいきすぎた事もあり、上手く行かない、前からあまり変わらないことに焦る自分が居て、それが嫌ですね。やはり楽しむこと、作る事を楽しむ事が良いと思うのです。
だらだら書いてしまいましたが、結局今回のinrofはアイデアが尽きてしまっていることで、無理に目標を立てようとしているのが現状です。と、ブログに書いてみてようやくわかりました。
逆にマイクロマウスは今年は未知の領域だらけなので、モチベーションが高いです。inrofはそこそこ動くようになったら、無理な機能は入れず、安定化を1番に考えて、マウスに時間を割きたいなという思いです。ただ今は安定していないので、探索をなんとかするのが課題でしょうか。少しinrofに理想を求めすぎていたような気がします。純粋に、安定してボールを取れることを出来たらOKにして、速さとか新しいこととかにとらわれない方がいいのかなと思います。柔軟に行こうと思います。とはいえ、去年のアルゴリズムは読みにくい上にミスが多く調整しにくいので、新アルゴリズムは継続します。だいたいできて来ているので。
とりあえず明日は探索を調整してみます。間に合わないでしょうが、まぁやらないと始まらないので。ものづくりチャレンジは交流を広くする事をメインで考えて行こうと思います。
今日はこの辺で。
2017年1月5日木曜日
状況
inrofの調整中です。
今の所
自由ボール→物理量ベースにより安定
ライントレース→新アルゴリズムは動かしてみたものの、全く安定しないので、旧アルゴリズムの考え方で書き直す事で動くように
探索→アルゴリズムにバグはないが、ボールをあげるときに落としてしまう…原因はアームが下がりきっていないか、電池切れかよくわかっていない
という感じです。
新アルゴリズムはダメでした。加速時にライントレースすると色々と狂う模様です。去年の方が安定感があるので、速度の限界まではこれで行こうかなという感じです。現在500m/sです。遅いですね。
ちょっと色々と間に合っていない感があります。ハードも色々と扱いづらいです。どうにか動くようにして、マウスに時間をかけたいなぁという感じです。
今日はこの辺で。
今の所
自由ボール→物理量ベースにより安定
ライントレース→新アルゴリズムは動かしてみたものの、全く安定しないので、旧アルゴリズムの考え方で書き直す事で動くように
探索→アルゴリズムにバグはないが、ボールをあげるときに落としてしまう…原因はアームが下がりきっていないか、電池切れかよくわかっていない
という感じです。
新アルゴリズムはダメでした。加速時にライントレースすると色々と狂う模様です。去年の方が安定感があるので、速度の限界まではこれで行こうかなという感じです。現在500m/sです。遅いですね。
ちょっと色々と間に合っていない感があります。ハードも色々と扱いづらいです。どうにか動くようにして、マウスに時間をかけたいなぁという感じです。
今日はこの辺で。
2017年1月4日水曜日
マウス、始動
新年スタートの投稿をしましたが、もう新年なのかという感じです。時が経つのは早いですね。
新年最初の作業は、inrofのソフトウェアです。車体手元にないですが、一通り書きました。ただ、書いて時間がたった後、脳内デバッグでミス4つほど見つけましたし、動くのかなあという感じです。明日からロボットに触れるので、一通りの動作が実際にできればなぁという感じです。プログラム自体は、かなり読みやすくなった…と思います。昔のは関数を上手く使うとかほとんど考えずに、動けば良いやという感じの自由なコードだったので、それよりは良くなったと思います(行数がかなり減りました)。ただ、ライントレースのところはアルゴリズムを根本的に変えているので、果たして上手くいくかなという感じです。
その後は、3DCADを入れることにしました。色々考えた結果、DesignSparkMechanicalを入れました。
主な理由としては、Fusion360は動作環境的に心配なのと(グラフィックカードとか)、そこまで高機能でも使いこなせる自信がなかったことから、扱いやすいらしい、フリーのCadということでこれにしました。
無事入れられたので、とりあえず横にある初めての方向けみたいなチュートリアルに従って適当に作ってみました。


3DCADはいいですね。楽しいです。やはり次の機体が動くのを妄想しながら作ると、なんだか楽しくなりますよね。現実動くかなんて知りませんが…。マウスはチャレンジなので、やりたいことは積極的にやっていきたいというスタンスです。
今週はinrofの機体と作業になります。大会には、まぁできるかわからないけど、出来たらラッキー程度に。まだボールが取れるかすら不明ですが、しっかりネタは入れておくという事をしているので、そこまで行ければいいな、いや、それは夢ですね。なんでもないです。とりあえず動いて欲しいです。
今日はこの辺で。
新年最初の作業は、inrofのソフトウェアです。車体手元にないですが、一通り書きました。ただ、書いて時間がたった後、脳内デバッグでミス4つほど見つけましたし、動くのかなあという感じです。明日からロボットに触れるので、一通りの動作が実際にできればなぁという感じです。プログラム自体は、かなり読みやすくなった…と思います。昔のは関数を上手く使うとかほとんど考えずに、動けば良いやという感じの自由なコードだったので、それよりは良くなったと思います(行数がかなり減りました)。ただ、ライントレースのところはアルゴリズムを根本的に変えているので、果たして上手くいくかなという感じです。
その後は、3DCADを入れることにしました。色々考えた結果、DesignSparkMechanicalを入れました。
主な理由としては、Fusion360は動作環境的に心配なのと(グラフィックカードとか)、そこまで高機能でも使いこなせる自信がなかったことから、扱いやすいらしい、フリーのCadということでこれにしました。
無事入れられたので、とりあえず横にある初めての方向けみたいなチュートリアルに従って適当に作ってみました。

テスト
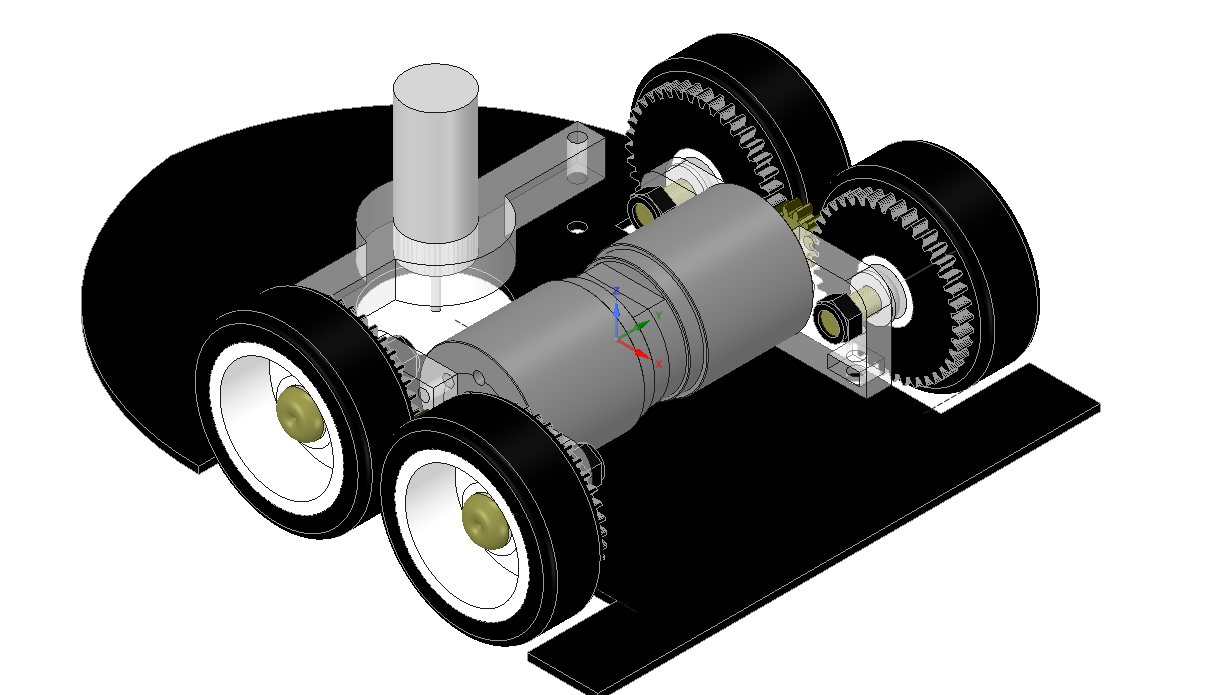
その後は新作マウスの設計を開始しました。
1717モータ、ホイール、ギアとか
まだまだ入れたばかりなので扱いに慣れていない感じです。ただ、動作は全然重くなかったので良かったです。ちょっとパソコンのファンが回っている感じですが、とりあえず問題なさそうで良かったです。3DCADはいいですね。楽しいです。やはり次の機体が動くのを妄想しながら作ると、なんだか楽しくなりますよね。現実動くかなんて知りませんが…。マウスはチャレンジなので、やりたいことは積極的にやっていきたいというスタンスです。
今週はinrofの機体と作業になります。大会には、まぁできるかわからないけど、出来たらラッキー程度に。まだボールが取れるかすら不明ですが、しっかりネタは入れておくという事をしているので、そこまで行ければいいな、いや、それは夢ですね。なんでもないです。とりあえず動いて欲しいです。
今日はこの辺で。
登録:
投稿 (Atom)