いやー、今週は、結構しんどかったです…。
大会6日前にして壁制御がほとんどろくにかかっていないことが判明したり、大会3日前にピニオンが滑りしかもそれがえらく分かりづらくて1日溶かしたりと、色々ありました。細かいことは、大会後にでも書こうと思います。
色々あったので時間をギリギリまで使い人間の方も限界寸前まで頑張って調整しました。いや、もしかしたら人間の方は気付いていないだけで本当は限界かもしれません。
とりあえずなんとか最終調整日である今日にギリギリ試したい項目の調整は完了し、あとは大会でどう出るかといったところです。まあ完璧とはいきませんが、やれることはやったと思います。
余裕があれば試走会とか懇親会とか行きたかったのですが…まあ、参加者の皆さんは、明日お会いしましょう。
とりあえず、あとは人間が倒れないように、マウスを壊さないように、今日は休みます。参加者の方々、明日はお互い頑張りましょう。
ところで、地味に台風が心配ですね。交通系に影響して自分の方に実害が出なければ良いのですが…。ともかく安全第一で行こうと思います。
今日はこの辺で。
2018年9月23日日曜日
もう少しなはず…
いやー、あと1週間後に学生大会ですか。厳しいですね。
このところやったところと問題をまとめていきます。
まず、斜め制御を試して見ました。まあまあ効いているように見えますがまだ詳しいところは分からないです。とりあえずアルゴリズムだけ書いて今は調整せず使ってもいません。
その後は怪しい各種ゲインを頑張って調整しました。全体的にハイゲイン気味なところをログと動きを見ながら潰していきました。
特に壁制御はこれまでは割と致命的だったようで、Dゲインが大きすぎて両壁でマウスを端に寄せると壁によっていく現象が発生しました。適切に下げたところ探索時の安定性が向上したように思えます。
小回りターンと最短のターンも、ゲインを変えたのでもう1度再調整しました。
と、結構調整したつもりなのですが、依然として状況はあまり良くなく、現状の問題としては
・最短時の壁制御不安定
高速直進時の壁制御で、たまにどちらかの壁によっていくことがあります。スローで見てみたところ、加速から定速に移るあたりで少しずれた角度が直せていないみたいに見えますが、ちょっとよくわかっていません。壁制御なしで試すとゲイン調整が効いているのか真っ直ぐ進むみたいなので、壁制御でずれているようなのですが難しいですね…。
・ターンがずれる
大きい迷路で試すと少しのずれが目立ってきますね。これは要調整です。
という感じで現状、探索はまあ良さげですが最短がダメダメでして厳しいです。サーキットも昨日の段階で最低パラメータでも2回機体がぶつかってひっくり返ったりしているしやはり高速走行は難しいですね。壁制御がなかなか安定しません…。
少しずつ改善はしているはずなので、あと少しだと思うのですが、学生大会まで1週間しかないのはなかなか大変ですね。うーん、本番は全日本とはいえ、学生大会もターゲットにしていたのでしっかり走らせたいところなのですが、まあ、やはりマウスは難しいですね。
とりあえず使える時間を有効に使っていきたいところです。
今日はこの辺で。
このところやったところと問題をまとめていきます。
まず、斜め制御を試して見ました。まあまあ効いているように見えますがまだ詳しいところは分からないです。とりあえずアルゴリズムだけ書いて今は調整せず使ってもいません。
その後は怪しい各種ゲインを頑張って調整しました。全体的にハイゲイン気味なところをログと動きを見ながら潰していきました。
特に壁制御はこれまでは割と致命的だったようで、Dゲインが大きすぎて両壁でマウスを端に寄せると壁によっていく現象が発生しました。適切に下げたところ探索時の安定性が向上したように思えます。
小回りターンと最短のターンも、ゲインを変えたのでもう1度再調整しました。
と、結構調整したつもりなのですが、依然として状況はあまり良くなく、現状の問題としては
・最短時の壁制御不安定
高速直進時の壁制御で、たまにどちらかの壁によっていくことがあります。スローで見てみたところ、加速から定速に移るあたりで少しずれた角度が直せていないみたいに見えますが、ちょっとよくわかっていません。壁制御なしで試すとゲイン調整が効いているのか真っ直ぐ進むみたいなので、壁制御でずれているようなのですが難しいですね…。
・ターンがずれる
大きい迷路で試すと少しのずれが目立ってきますね。これは要調整です。
という感じで現状、探索はまあ良さげですが最短がダメダメでして厳しいです。サーキットも昨日の段階で最低パラメータでも2回機体がぶつかってひっくり返ったりしているしやはり高速走行は難しいですね。壁制御がなかなか安定しません…。
少しずつ改善はしているはずなので、あと少しだと思うのですが、学生大会まで1週間しかないのはなかなか大変ですね。うーん、本番は全日本とはいえ、学生大会もターゲットにしていたのでしっかり走らせたいところなのですが、まあ、やはりマウスは難しいですね。
とりあえず使える時間を有効に使っていきたいところです。
今日はこの辺で。
2018年9月20日木曜日
新機能追加中
あと10日。そろそろ本気を出しています。
とりあえず新機能ということで、まず最短時壁切れを実装しました。今日は機能追加がメインなので1度走らせただけですが、前より綺麗に走れるようになりました。柱にもぶつからずに帰ってきたので良い感じです。
斜め制御はまだようやくアルゴリズムを書くだけ書いたという状態です。今年は去年と違う制御なので、うまくいくかは今後に見ていきます。一応センサのログは良い感じなので、斜め壁切れもうまく出来そうな感触です。
あとは壁制御の値変化の対策が下がる時にしか入っていなかったことに気づき修正しました。また、壁制御で一部壁判定の閾値を間違った記述をしている箇所を見つけたので修正しました。
ということで次は斜め制御の確認からですね。それが出来たら、ゲイン調整ですかね。
今日はこの辺で。
とりあえず新機能ということで、まず最短時壁切れを実装しました。今日は機能追加がメインなので1度走らせただけですが、前より綺麗に走れるようになりました。柱にもぶつからずに帰ってきたので良い感じです。
斜め制御はまだようやくアルゴリズムを書くだけ書いたという状態です。今年は去年と違う制御なので、うまくいくかは今後に見ていきます。一応センサのログは良い感じなので、斜め壁切れもうまく出来そうな感触です。
あとは壁制御の値変化の対策が下がる時にしか入っていなかったことに気づき修正しました。また、壁制御で一部壁判定の閾値を間違った記述をしている箇所を見つけたので修正しました。
ということで次は斜め制御の確認からですね。それが出来たら、ゲイン調整ですかね。
今日はこの辺で。
2018年9月18日火曜日
吸引探索断念
あと12日、うーん、なかなか厳しいですね。
まず、バッテリーに関して。これまで燃費が悪いと言っていましたが、もう使わないと決めたのでネタバラシ。吸引探索にトライしていました。これによってバッテリーの減りが早く、今日、バッテリーの容量を倍にして動かしてみたのですが、ダメなことがわかりました。
というのも持ち自身は良くなったのですが、やはり吸引探索は長時間大電流を流し続けることになるので、バッテリーに良くない模様で、最短の際に放電性能が一時的に悪くなるような動きをすることがわかってきました。
ということで、吸引探索を諦めて非吸引の探索のパラメータを調整していたのですが、どうにもまだ若干不安定です。いや、走るには走るのですが、壁制御が怪しかったり、よくわからないところでフェールセーフがかかったりします。既知区間加速が入ると結構不安定な動きをします。
最短もまだ問題がありそうですね。今日はやたら45度入ターンが変だったような。まあ今日はバッテリーが重くなっていて重心も変わっていたので、深追いはしませんでした。しかし、変なタイミングでフェールセーフかかるのは、何なのでしょうか。
調整の問題なのか根本的に良くないのかが分かりにくいのがなかなか難しいところですね。特に速度が違う時の壁制御のゲインとその他のパラメータや、速度や動きが違う際のジャイロのゲインなど、なかなかパラメータが多い上に分かりにくいです。
調整もそうですがそろそろ最短系の新機能を入れていきたいというのも事実です。明日は迷路が無いので、壁切れとか入れていこうかなと思います。あとは探索のゲインを見直してみても良いかもですね。壁制御も、少し真面目に考えて見たほうが良いかもです。結構やることありますね…。
まあデータフラッシュの値保持は出来るようになったので、探索と最短は分けて調整できるので、時間をうまく使っていきたいところです。どうにか、変な動作がなくなってほしいですね。
今日はこの辺で。
2018年9月15日土曜日
学生大会まであと2週間
マウスの動きを改善していっています。
気になっていたところを詰めていっています。
まずは、壁制御。直進時にふらつくのが気になったため、長い直進を何度も走らせ調整しました。意外と調整が難しく、遅ければ適当な値でも走っているように見えるし、速くしすぎるとそもそもの機体性能の限界で制御どころではなくなる(両方のモーターが全力で回ることになる)ので、限界を見極めた上でふらつかないように調整する必要があります。バッテリーの心配もしなくてはなので結構大変です。
とはいえそれなりに調整し、前よりはかなり改善したように見えます。フラつきも減りましたし、復帰も早くなったように思えます。
その後は小回りターンを練習しました。これはとにかく連続させる迷路で調整しました。探索の成功率がかなり上がりました。
そして最短のターンを微調整しました。主にV90を調整しました。今の迷路はV90連続数えたくない回くらいやる迷路なのですが、越えられるようになりました。斜めの制御はまだ入れていない段階で走れているので、軌跡の再現性は結構いいようですね。これでようやく難しい迷路でも往復最短が出来るようになりました。
あとはサーキットで新パラメータを作成しました。とは言ってもあまり調整しきれず、実際にはまだ走れません。まあ走れそうな感触はあるので、今後の調整が重要ですね。
そこそこ良い感じに調整できているようにも思えますが、悪いことも起きています。
えーと、ホイールが割れました。終盤にサーキットで速いパラメータで柱にクラッシュした時に割れた模様です。うーむ、やはりアクリルホイールであの薄さでは速さを上げると耐えきれなくなるみたいですね…。剛性を強化したものを設計し、発注しようと思います。予備はあるので今のところ大きな問題はないですが、この調子だといつ予備が尽きるかわかりませんね…。まあ、安定性を高めたスパーギア周りは衝撃に耐えられているようなのでそこは狙い通りです。そうすると消去法的にホイールが壊れるのは納得はいきます。早いうちにもろさがわかるのは大切です。
あ、あと柱も真っ二つに割りました。2枚抜きできる速度ではないですが、1枚くらいなら抜ける模様ですね(そうじゃなくてちゃんとぶつからないようにしよう)。
直進のパラメータの方も、大体今回の機体の限界がわかってきました。去年よりも速くできているのは良いですが、今の自分の制御だと上位陣には届かない模様ですね。うーん、しかしあの人たちはどうしてあんな加速度出せるのでしょうか…。
探索も一度だけ前壁後検知したのが気になりましたね。もう少しというところでしょうか。
あと燃費が悪いのは調整においても嫌なので、早くバッテリー届かないかな。
まあある程度調整できてきているので、ぼちぼち新しいことを入れていきたいなと思います。とりあえず
・データフラッシュの値保持
・最短、サーキット直進時壁切れ(ターン前)
・斜めの壁制御
あたりを入れておきたいなあと。特に意外とデータフラッシュの値が書き換わってしまうのは、せっかく迷路データが保存できても探索し直さなければならず頭が悪いので、入れたいところです。
下記2つはまあ、多少時間がかかると思いますが、頑張って調整します。
斜め中壁切れは、どうやるかのイメージを固めるところからですね。
あとは最短の180度ターン調整とか探索で別のパラメータ作成などありますが、1個1個やっていきます。
学生大会まであと2週間ですね。とりあえず、目標を宣言しておきます。
・クラシック
全面探索と、最低パラメータでも良いので最短走行を決める
・サーキット
目指すは、6秒台
というあたりをターゲットに、これから2週間は頑張ります。ところで学生大会のサーキット登録機体4台って、いつもよりだいぶ少ないですね。まあ自分は自分の走行をするだけなので、やるべきことをやっていこうと思います。
今日はこの辺で。
全面探索と、最低パラメータでも良いので最短走行を決める
・サーキット
目指すは、6秒台
というあたりをターゲットに、これから2週間は頑張ります。ところで学生大会のサーキット登録機体4台って、いつもよりだいぶ少ないですね。まあ自分は自分の走行をするだけなので、やるべきことをやっていこうと思います。
今日はこの辺で。
2018年9月14日金曜日
確認
久々に広い迷路でマウスを動かしてみました。
修理は有効に働いたようで、とりあえず変な動作は無くなりました。良かったです。
ゲインをちょっと変えようかとも思いましたが、意外と前のままの方が安定している模様で、エンコーダのところを少し変える程度にとどめました。
ゲイン以上に、バッテリーの状態が直進では響いてくる模様です。当たり前ですが、加速度や最高速をあげるとバッテリーが切れている時と満充電の時で挙動がかなり異なりますね。なるほど。とりあえず適当に作った最低パラメータの予定のものは、バッテリーの状況の影響はほとんど受けなさそうなことを確認しました。限界の見極めは大事ですね。
あとは軽く調整しました。今日から迷路の難易度を上げているので、走行では細かいずれが見えて来ました。やはり小回りターンや最短のターンは、結構頑張らないと走れなさそうですね。とはいってもオーバーホールした割にはターンの挙動はそこまで変わっていない模様なので、とりあえずそこは良かったです。
今日やったのはそんなところで、まあ軽い確認ですね。
正直今のところバッテリーをいずれ変える以上色々と迷いがあって、どうしようかなといったところですね。特に探索と最短のパラメータをどの辺に設定しておくか、が決めにくいところです。
一応今後やりたいところを書き出しておくと
・壁制御調整(最短時は必須、探索はどうだろうといったところ)
・小回りターン、最短ターンの細かい調整(ネイピアターンの比例定数含む)
・探索のパラメータもう1種作成
・プログラム書き換え後のデータフラッシュの値保持
・最短時壁切れ
・斜め制御
・斜め壁切れ(?)
・(バッテリー変更)
といったところですね。
とりあえず明日は上3つをやってみようかと思います。
壁制御は、サーキットで試そうかなと考え中。サーキットはバッテリーの心配はあまりないので、高めのパラメータを作っても良いかもですね。
今日はこの辺で。
修理は有効に働いたようで、とりあえず変な動作は無くなりました。良かったです。
ゲインをちょっと変えようかとも思いましたが、意外と前のままの方が安定している模様で、エンコーダのところを少し変える程度にとどめました。
ゲイン以上に、バッテリーの状態が直進では響いてくる模様です。当たり前ですが、加速度や最高速をあげるとバッテリーが切れている時と満充電の時で挙動がかなり異なりますね。なるほど。とりあえず適当に作った最低パラメータの予定のものは、バッテリーの状況の影響はほとんど受けなさそうなことを確認しました。限界の見極めは大事ですね。
あとは軽く調整しました。今日から迷路の難易度を上げているので、走行では細かいずれが見えて来ました。やはり小回りターンや最短のターンは、結構頑張らないと走れなさそうですね。とはいってもオーバーホールした割にはターンの挙動はそこまで変わっていない模様なので、とりあえずそこは良かったです。
今日やったのはそんなところで、まあ軽い確認ですね。
正直今のところバッテリーをいずれ変える以上色々と迷いがあって、どうしようかなといったところですね。特に探索と最短のパラメータをどの辺に設定しておくか、が決めにくいところです。
一応今後やりたいところを書き出しておくと
・壁制御調整(最短時は必須、探索はどうだろうといったところ)
・小回りターン、最短ターンの細かい調整(ネイピアターンの比例定数含む)
・探索のパラメータもう1種作成
・プログラム書き換え後のデータフラッシュの値保持
・最短時壁切れ
・斜め制御
・斜め壁切れ(?)
・(バッテリー変更)
といったところですね。
とりあえず明日は上3つをやってみようかと思います。
壁制御は、サーキットで試そうかなと考え中。サーキットはバッテリーの心配はあまりないので、高めのパラメータを作っても良いかもですね。
今日はこの辺で。
2018年9月13日木曜日
修理
タイトル通り、マウスの修理をしました。
結局デモ走行の不具合はピニオン滑りと判明しました。これで3度目なので、固定方を変更しました。前まではピニオンの内側にロックタイトオンリーだったのですが、ギアが薄い分厳しい模様なので、ロックタイトで内側、メタルロックで外側を固定する形を取りました。これでだいぶガッチリしたと思います。
しかし、こうと気付かず吸引モーターを変えてしまいました。少し時間のロスですね。
また、足回りでも1つシャフトが微妙に曲がっているものを見つけました。かなりわかりずらいですが、タイヤの動きが違和感のある感じで見てみたら、少し曲がっていました。変更しました。
あとは懸念だったスパーギアとベアリングの固定を、糸を挟んでより強固にしました。ネジの反対側に糸を挟むことで、安定性が向上することを狙っています。
あとはバッテリーも別のを注文しました。2種類頼みましたが片方は在庫切れで1つ分しか作れない模様です。もう片方はサイズが大きすぎないかが少し懸念しているところです。最悪旧作のを使えそうなことも確認しましたが、できれば今回発注したもので作りたいところです。
最後にタイヤを交換しました。
明日、明後日はとりあえずゲインやターン、タイヤ径など、オーバーホールして色々変わってくると思うので調整します。ゲインに関してはデモ走行の時に少し改善できそうな話を聞いたので、若干変更予定です。ターンに関してはバッテリーが変わることによる重心の変化とかも気になるので、まあパラメータ作りすぎず、安定パラメータを作っていくところですね。
あとは書き込み後のデータフラッシュの継続もそろそろ入れたいです。
今日はこの辺で。
結局デモ走行の不具合はピニオン滑りと判明しました。これで3度目なので、固定方を変更しました。前まではピニオンの内側にロックタイトオンリーだったのですが、ギアが薄い分厳しい模様なので、ロックタイトで内側、メタルロックで外側を固定する形を取りました。これでだいぶガッチリしたと思います。
しかし、こうと気付かず吸引モーターを変えてしまいました。少し時間のロスですね。
また、足回りでも1つシャフトが微妙に曲がっているものを見つけました。かなりわかりずらいですが、タイヤの動きが違和感のある感じで見てみたら、少し曲がっていました。変更しました。
あとは懸念だったスパーギアとベアリングの固定を、糸を挟んでより強固にしました。ネジの反対側に糸を挟むことで、安定性が向上することを狙っています。
あとはバッテリーも別のを注文しました。2種類頼みましたが片方は在庫切れで1つ分しか作れない模様です。もう片方はサイズが大きすぎないかが少し懸念しているところです。最悪旧作のを使えそうなことも確認しましたが、できれば今回発注したもので作りたいところです。
最後にタイヤを交換しました。
明日、明後日はとりあえずゲインやターン、タイヤ径など、オーバーホールして色々変わってくると思うので調整します。ゲインに関してはデモ走行の時に少し改善できそうな話を聞いたので、若干変更予定です。ターンに関してはバッテリーが変わることによる重心の変化とかも気になるので、まあパラメータ作りすぎず、安定パラメータを作っていくところですね。
あとは書き込み後のデータフラッシュの継続もそろそろ入れたいです。
今日はこの辺で。
2018年9月10日月曜日
デモ走行
昨日一昨日とデモ走行してきました。
そして新作が一気に不調になりました。困りましたね。とりあえず、デモ走行時の様子を書いておきます。
1日目
前半、というか結構終日新作が好調だったので新作で走らせていました。大体は最短往復できるくらいは走っていました。
ただ終盤、唐突に最短走行の再現性がなくなってしまいました。というかある意味安定して走らなくなりました。
その後検証しようにも良くわからず。ジャイロが怪しかったのでオフセットの取り方を一工夫したり一度分解して掃除したりするもあまり効果なし。探索は走るのに最短だと色々おかしくなります。ログをとっても特におかしくなさそうで、この辺で良くわからなかったのでこの日は切り上げました。
2日目
とりあえずダメ元で新作を試してみました。前日の段階で加速度と最高速を抑え気味のパラメータにしていたのですが、最初はそれでなぜか走りました。ますます訳がわからないわけなので、旧作とダブルで出す作戦にしました。
旧作もなんか動きが怪しいですがまあ一応そこそこ走っていました。ただ、探索に関しては新作の方が綺麗な動きの印象です。やはり壁制御の差が出ている気がします。
新作は探索、スタートへ帰還、そして最短でふらつき壁に激突の流れを繰り返していました。この辺で壁制御がおかしいことはつかめました。しかしなぜ最短だけ。
そして終盤にはついに壁の判定までうまくいかず探索すら走れないというお粗末な状態になりました。うーん、2日動かし続けるだけでここまでとは…。仕方なく旧作に頑張ってもらいました。旧作は動きは綺麗とは言えませんが、まあまあ最短まで決めてくれました。
ということで新作が見事に不調になりました。今のうちに怪しい箇所をあぶり出すのは目的の1つだったので、そういう意味では想定どおりですが、しかしどこが原因かわからない間はもやっとしますね。
一番今怪しいと睨んでいるのが、吸引モーターのブラシ損失ですね。最短でうまくいかない、なんかフラつくという症状、また、2日目の最初の試走で実は吸引ファンの駆動が多少遅れることがあったこと、また、1日目にこれも書き忘れましたが吸引モーターの固定が外れかけていたことで負荷がかかったこと…などからここかなと推測しています…が、果たしてどうかは知りません。
ただ今は少し疲れていて作業をする気がいまいちわきません。先週結構色々調整を頑張っていたことが溜まっている模様です。ロボットも人間も疲れ気味ですね…。
機体の修理以外にもバッテリー変更とか色々やりたいですね。学生大会まで地味に3週間を切っているので、合わせていきたいところです。
新作が不調なのは少し苦しいところですが、デモで来ていた、特に小さな子供たちが楽しそうに機体を見て「これ面白い!」と言ってくれたことが結構嬉しかったりします。
自分も3年前くらいに、地区大会でとんでもなく速い吸引マウスを見て、衝撃を受けたことをよく覚えています。
マウスが不調だったり、調整項目が多かったりすると結構大変だったりしますが、動いてくれるとその分嬉しいし、それを見ている人が喜んでいるならなおさら嬉しいところです。こういう気持ちは大事にしていきたいですね。
さて、人の方が元気になったら、またギアを変えて頑張っていきます。少し長い文になりましたね。すみません。
今日はこの辺で。
そして新作が一気に不調になりました。困りましたね。とりあえず、デモ走行時の様子を書いておきます。
1日目
前半、というか結構終日新作が好調だったので新作で走らせていました。大体は最短往復できるくらいは走っていました。
ただ終盤、唐突に最短走行の再現性がなくなってしまいました。というかある意味安定して走らなくなりました。
その後検証しようにも良くわからず。ジャイロが怪しかったのでオフセットの取り方を一工夫したり一度分解して掃除したりするもあまり効果なし。探索は走るのに最短だと色々おかしくなります。ログをとっても特におかしくなさそうで、この辺で良くわからなかったのでこの日は切り上げました。
2日目
とりあえずダメ元で新作を試してみました。前日の段階で加速度と最高速を抑え気味のパラメータにしていたのですが、最初はそれでなぜか走りました。ますます訳がわからないわけなので、旧作とダブルで出す作戦にしました。
旧作もなんか動きが怪しいですがまあ一応そこそこ走っていました。ただ、探索に関しては新作の方が綺麗な動きの印象です。やはり壁制御の差が出ている気がします。
新作は探索、スタートへ帰還、そして最短でふらつき壁に激突の流れを繰り返していました。この辺で壁制御がおかしいことはつかめました。しかしなぜ最短だけ。
そして終盤にはついに壁の判定までうまくいかず探索すら走れないというお粗末な状態になりました。うーん、2日動かし続けるだけでここまでとは…。仕方なく旧作に頑張ってもらいました。旧作は動きは綺麗とは言えませんが、まあまあ最短まで決めてくれました。
ということで新作が見事に不調になりました。今のうちに怪しい箇所をあぶり出すのは目的の1つだったので、そういう意味では想定どおりですが、しかしどこが原因かわからない間はもやっとしますね。
一番今怪しいと睨んでいるのが、吸引モーターのブラシ損失ですね。最短でうまくいかない、なんかフラつくという症状、また、2日目の最初の試走で実は吸引ファンの駆動が多少遅れることがあったこと、また、1日目にこれも書き忘れましたが吸引モーターの固定が外れかけていたことで負荷がかかったこと…などからここかなと推測しています…が、果たしてどうかは知りません。
ただ今は少し疲れていて作業をする気がいまいちわきません。先週結構色々調整を頑張っていたことが溜まっている模様です。ロボットも人間も疲れ気味ですね…。
機体の修理以外にもバッテリー変更とか色々やりたいですね。学生大会まで地味に3週間を切っているので、合わせていきたいところです。
新作が不調なのは少し苦しいところですが、デモで来ていた、特に小さな子供たちが楽しそうに機体を見て「これ面白い!」と言ってくれたことが結構嬉しかったりします。
自分も3年前くらいに、地区大会でとんでもなく速い吸引マウスを見て、衝撃を受けたことをよく覚えています。
マウスが不調だったり、調整項目が多かったりすると結構大変だったりしますが、動いてくれるとその分嬉しいし、それを見ている人が喜んでいるならなおさら嬉しいところです。こういう気持ちは大事にしていきたいですね。
さて、人の方が元気になったら、またギアを変えて頑張っていきます。少し長い文になりましたね。すみません。
今日はこの辺で。
2018年9月7日金曜日
まあまあ走れそう
昨日気になったところを中心に調整しました。
探索は壁切れの閾値を調整して、壁切れの再現性を高めました。また、袋小路補正の値を再調整しました。まあ改善したと思いますが、壁1枚だと怪しくないこともないかも(?)という感じです。走り込ませてよくみてみようという感じです。
最短は頑張ってターン調整しました。少し難しい迷路でも走れるようになりました。V907連続とかで試してみましたがそこそこ走っています。行き最短はバッテリーが切れなければ問題なく、帰り最短もまあまあな確率で成功します。まだ制御という制御は普通の直進時の壁制御くらいしかない気がしますが、そこそこ走ってくれるようです。
今の問題としてはソフトよりハードですね。バッテリーはやはり色々厳しく見えるので変更予定です。重量が増えますが、まあ仕方ないかなと思います。
また、今年の機体はベアリングとギヤをねじ止めしているのですが、ギヤが金属製ではないため少し外れやすい模様です。今日、直進の高いパラメータを調整しようとして壁にぶつかったときにホイールがガツンと内側によってしまいました。修正はそこまで大変ではないのですが、本番で起こると困るので、対策を立てなくてはです。間になんか挟んで滑り止めできないかなーと考え中です。
明日明後日はデモ走行的に何回も試走をするみたいなので、色々と変なところがないか確認していきます。
今日はこの辺で。
2018年9月6日木曜日
ターン調整など
色々と調整しました。
とりあえず各種ターン、探索時のジャイロや壁制御、タイヤ径などの調整をしてみました。だいぶ動きが良くなったように思えます。色々と怪しかったところを潰していっている感じです。
最短の成功率も上がり(まあターンを調整したから当たり前か)、帰り最短もできるようになりました。帰り最短もゴール処理をミスして壁に突っ込んだりしましたがとりあえずバグを取って走るようになりました。
他にも既知区間加速時の壁切れが大きくずれることがあったのでかけないようにしました。前から怪しかったのですが、どうにも厳しそうなのでカットしました。まあ、補正に頼りすぎないのも大事ですね。
あとはバッテリーがへたると安定性が低くなることも確認しました。怪しい動きをしたら一度バッテリーを見てみると良いということですね。他にもバッテリーが切れるのはやはり早いことも確認しました。どうしましょうかね。少し対策が必要です。
あとは今の問題点の整理です。
探索
・壁切れの閾値
柱の壁切れが読めたり読めなかったりします。誤読みはないみたいですが、あるところではしっかり読めるようにしたいです。
・袋小路補正
4方向に壁が1枚しかないと角度ズレがシビアになる模様ですね。壁補正のリファレンスの調整をしてみるのと、きつそうなら補正パターンを絞ることをしてみようかと思います。
最短
・壁制御
まだふらつきがあるような…。もう少し見てみます。
・ターン調整
もちろん今日行っただけでは簡単な迷路しかできないようなので、V90連続など、細かいところを見ていきたいです。
その他
・スイッチ不安定?
昨日直した気がするのですがタクトスイッチがたまに反応しない気がします…。要確認です。
・バッテリー
燃費を良くするかバッテリーを変えるか、まだ考え中です。少し他のことも試してみます。
今日はこの辺で。
とりあえず各種ターン、探索時のジャイロや壁制御、タイヤ径などの調整をしてみました。だいぶ動きが良くなったように思えます。色々と怪しかったところを潰していっている感じです。
最短の成功率も上がり(まあターンを調整したから当たり前か)、帰り最短もできるようになりました。帰り最短もゴール処理をミスして壁に突っ込んだりしましたがとりあえずバグを取って走るようになりました。
他にも既知区間加速時の壁切れが大きくずれることがあったのでかけないようにしました。前から怪しかったのですが、どうにも厳しそうなのでカットしました。まあ、補正に頼りすぎないのも大事ですね。
あとはバッテリーがへたると安定性が低くなることも確認しました。怪しい動きをしたら一度バッテリーを見てみると良いということですね。他にもバッテリーが切れるのはやはり早いことも確認しました。どうしましょうかね。少し対策が必要です。
あとは今の問題点の整理です。
探索
・壁切れの閾値
柱の壁切れが読めたり読めなかったりします。誤読みはないみたいですが、あるところではしっかり読めるようにしたいです。
・袋小路補正
4方向に壁が1枚しかないと角度ズレがシビアになる模様ですね。壁補正のリファレンスの調整をしてみるのと、きつそうなら補正パターンを絞ることをしてみようかと思います。
最短
・壁制御
まだふらつきがあるような…。もう少し見てみます。
・ターン調整
もちろん今日行っただけでは簡単な迷路しかできないようなので、V90連続など、細かいところを見ていきたいです。
その他
・スイッチ不安定?
昨日直した気がするのですがタクトスイッチがたまに反応しない気がします…。要確認です。
・バッテリー
燃費を良くするかバッテリーを変えるか、まだ考え中です。少し他のことも試してみます。
今日はこの辺で。
2018年9月5日水曜日
タクトスイッチ交換
どうも。ハード系のトラブルは嫌ですね。
いや、前回、スイッチの反応がーという話をしましたが、あのあと該当部分をはんだ当て直して直した気でいました。
でも、また再発しまして、強く押すと反応することからスイッチの劣化と判断し、取り替えることにしました。しかし、ここで問題発生。スイッチを外すときに、ミスしてパターンが一部剥がれました。しかも、信号線をマイコンにつなぐ部分…嫌なところをやってしまいました。
ということでそれの修理に少し時間がかかりました。UEWを繋ぐわけですが、細いのがあまり手元になくしかも該当する信号線には繋げられるビアも打っていなかったので、マイコンのピンと繋ぐしかなく、まあ、気合いでつけました。
今のところ、動作は復帰したので、まあ良しとします。しかしモーターやセンサ周りではなくて良かったですが、少し寿命を削りますね。
多少調整もしていますが、まだまだ調整不足ですね。とりあえず最短のターンはまだ無調整なので調整したいですね。あとは壁制御も怪しいです。
あとはバッテリーの減りが思ったより速いので、今度検証したいところです。検証する安定感を得るのが、なかなか難しかったりするのですけどね。
とはいえ最短が出来ると嬉しいわけで、ぜひ学生大会で決められるように頑張っていきたいですね。
今日はこの辺で。
いや、前回、スイッチの反応がーという話をしましたが、あのあと該当部分をはんだ当て直して直した気でいました。
でも、また再発しまして、強く押すと反応することからスイッチの劣化と判断し、取り替えることにしました。しかし、ここで問題発生。スイッチを外すときに、ミスしてパターンが一部剥がれました。しかも、信号線をマイコンにつなぐ部分…嫌なところをやってしまいました。
ということでそれの修理に少し時間がかかりました。UEWを繋ぐわけですが、細いのがあまり手元になくしかも該当する信号線には繋げられるビアも打っていなかったので、マイコンのピンと繋ぐしかなく、まあ、気合いでつけました。
今のところ、動作は復帰したので、まあ良しとします。しかしモーターやセンサ周りではなくて良かったですが、少し寿命を削りますね。
多少調整もしていますが、まだまだ調整不足ですね。とりあえず最短のターンはまだ無調整なので調整したいですね。あとは壁制御も怪しいです。
あとはバッテリーの減りが思ったより速いので、今度検証したいところです。検証する安定感を得るのが、なかなか難しかったりするのですけどね。
とはいえ最短が出来ると嬉しいわけで、ぜひ学生大会で決められるように頑張っていきたいですね。
今日はこの辺で。
2018年9月4日火曜日
最短走行出来ました
とりあえず、題名通り、もちもち4号が最短走行できるようになりました。
シミュレータの方でゴール判定を少し間違えていたことがわかったのでそこを修正して、とりあえず過去の色々な迷路で経路が出ないor明らかに経路がおかしい迷路がないかを確認し、実機に移しました。今年はマップ生成の時点で斜め走行用のパスが簡単に出るようにしてあるので、実装は去年よりはかなり楽に出来ました。去年は歩数最短を斜めに変換するのと同時に走行も行う無駄に記述の多いプログラムだったので、そういう面でも賢く出来てきているのではないかなと思っています。
まだ大回り90度以外のターンは無調整ですが、一応4×4の小さい迷路なら問題なく走りました。もちろん今後ターンの調整はしますが、ネイピアターンにより滑りにくくシミュレータに近い軌跡を描けるようになっているのかもしれません。とりあえず少なくとも昨年の機体よりはターンが合いやすい印象です。
まだパラメータも1つしかなく、斜め中の壁制御や、直進時(斜めも)の壁切れも入っていないので動きは今後改善していく必要がありますが、とりあえずアルゴリズムは完成ということで、良かったです。
あと、今日久々に動かしたのですが探索がだいぶフラフラしていたりタクトスイッチが唐突に接触不良を起こしたりで少し拗ねている様子です。色々確認していかなければですね。
あとは自分向けのメモ。今後やることです。
・帰り最短
・最短で止まった時の復帰動作導入
・高速ターンでのジャイロ調整
・高速直進でのエンコーダ調整
・タイヤ径調整
・上2つを参考に探索時のゲインを変更、小回りターン調整
・壁制御調整(探索時、高速直進時)
・袋小路制御調整(特に90度旋回後)
・最短直進時、サーキット壁切れ
・斜め壁制御
・斜め壁切れ
・パラメータ増強
他にも確認したいことがなくもないですが、とりあえずこの辺ですかね。
今日はこの辺で。
シミュレータの方でゴール判定を少し間違えていたことがわかったのでそこを修正して、とりあえず過去の色々な迷路で経路が出ないor明らかに経路がおかしい迷路がないかを確認し、実機に移しました。今年はマップ生成の時点で斜め走行用のパスが簡単に出るようにしてあるので、実装は去年よりはかなり楽に出来ました。去年は歩数最短を斜めに変換するのと同時に走行も行う無駄に記述の多いプログラムだったので、そういう面でも賢く出来てきているのではないかなと思っています。
まだ大回り90度以外のターンは無調整ですが、一応4×4の小さい迷路なら問題なく走りました。もちろん今後ターンの調整はしますが、ネイピアターンにより滑りにくくシミュレータに近い軌跡を描けるようになっているのかもしれません。とりあえず少なくとも昨年の機体よりはターンが合いやすい印象です。
まだパラメータも1つしかなく、斜め中の壁制御や、直進時(斜めも)の壁切れも入っていないので動きは今後改善していく必要がありますが、とりあえずアルゴリズムは完成ということで、良かったです。
あと、今日久々に動かしたのですが探索がだいぶフラフラしていたりタクトスイッチが唐突に接触不良を起こしたりで少し拗ねている様子です。色々確認していかなければですね。
あとは自分向けのメモ。今後やることです。
・帰り最短
・最短で止まった時の復帰動作導入
・高速ターンでのジャイロ調整
・高速直進でのエンコーダ調整
・タイヤ径調整
・上2つを参考に探索時のゲインを変更、小回りターン調整
・壁制御調整(探索時、高速直進時)
・袋小路制御調整(特に90度旋回後)
・最短直進時、サーキット壁切れ
・斜め壁制御
・斜め壁切れ
・パラメータ増強
他にも確認したいことがなくもないですが、とりあえずこの辺ですかね。
今日はこの辺で。
2018年9月2日日曜日
経路導出アルゴリズム完成!
9月になりましたね。
ええと、本当は先月中に終えたかったものですが、経路導出のシミュレータのほうが、ようやく完成しました。なかなか場合分けが多かったので、バグを取りきるのが結構大変でした。様々な迷路(10個くらい)で試してみましたが、一応どれも経路は正しく出ているようです。適当に例を載せておきます。



どれも特に問題なさそうな経路が出るようになったかなと思います。アルゴリズムとしてはダイクストラ法時間ベース的な感じです。計算時間のほうもとりあえずPC上では一瞬で終わっているので、多分問題ないかと思います。アルゴリズム自身はポイントさえつかめてしまえばそこまで難しいものではないのですが、やはり斜め走行だとターンごとに結構な量のパターンがあるので、実際に書き出すと大変だった印象です。
まあ、ようやっと実際のパラメータに基づいた経路が出せるようになったので、よかったです。パラメータを変えると同迷路でも経路が変わる場合もあって、例えば2017クラシックエキスパート決勝の迷路は直進速度と加速度を引き延ばすと外回りの経路を選択するようになります。面白いですね。あ、言い忘れていましたが上の迷路で参照しているパラメータは旧作が公式大会で走った中の一番速いパラメータです。旧作は直進が遅いので、2017クラシック迷路では歩数最短と同経路をとる模様です。
一応、経路から走行タイムの予想もできるのですが、ちょっと実際とずれるみたいです。参考までに、旧作が4.27秒で走った経路が、シミュレータ上では4.50秒と出ています。ざっくりとはわかりますが、おそらく壁切れとかもろもろで実際とずれるみたいなので、参考程度にしています(記述のミスは確認してみましたが、とりあえずなさそうに見えます)。
経路シミュレータに関してはこんな感じですかね。ミスがないか怖いので、もう少しほかの迷路で試してみてもよいかもです。
あとはマウスのほうにこれを移してきて、最短走行ができるようにしていきたいですね。下準備として、各ターンを調整できるようにしました。そして最短をかこうとして気づいたのですが、まだゴール処理をしていなかったので、追加しなくてはですね。
そういえば、昨日は東日本大会でしたね。今年は参加できなかったので、適当に競技結果を見たりできたてのシミュレータで迷路を走らせてみたりしてました。やはり上位勢の吸引機は速いですね。サーキットもレベルが上がっているように見えます。ちなみに自分の経路の結果はこちらです。皆さんはどこのルートを通ったのでしょうか。

さて、今月末が学生大会ですね。とりあえず学生大会の目標としては、クラシックで斜め最短を決めることですかね。そのためには安定した探索をできることと、斜め走行時の制御を作り上げるところが重要になってくるかな、と思います。まあとりあえず今は、最短をできるようにしたいと思います。
今日はこの辺で。
ええと、本当は先月中に終えたかったものですが、経路導出のシミュレータのほうが、ようやく完成しました。なかなか場合分けが多かったので、バグを取りきるのが結構大変でした。様々な迷路(10個くらい)で試してみましたが、一応どれも経路は正しく出ているようです。適当に例を載せておきます。

2015クラシックエキスパート決勝
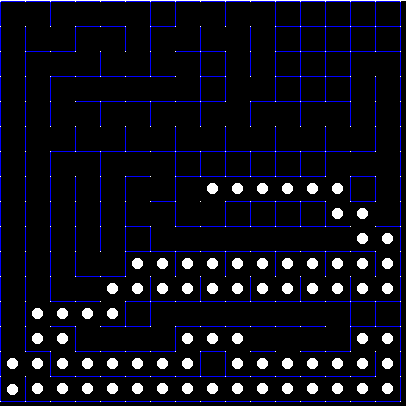
2016クラシックエキスパート決勝

2017クラシックエキスパート決勝
まあ、ようやっと実際のパラメータに基づいた経路が出せるようになったので、よかったです。パラメータを変えると同迷路でも経路が変わる場合もあって、例えば2017クラシックエキスパート決勝の迷路は直進速度と加速度を引き延ばすと外回りの経路を選択するようになります。面白いですね。あ、言い忘れていましたが上の迷路で参照しているパラメータは旧作が公式大会で走った中の一番速いパラメータです。旧作は直進が遅いので、2017クラシック迷路では歩数最短と同経路をとる模様です。
一応、経路から走行タイムの予想もできるのですが、ちょっと実際とずれるみたいです。参考までに、旧作が4.27秒で走った経路が、シミュレータ上では4.50秒と出ています。ざっくりとはわかりますが、おそらく壁切れとかもろもろで実際とずれるみたいなので、参考程度にしています(記述のミスは確認してみましたが、とりあえずなさそうに見えます)。
経路シミュレータに関してはこんな感じですかね。ミスがないか怖いので、もう少しほかの迷路で試してみてもよいかもです。
あとはマウスのほうにこれを移してきて、最短走行ができるようにしていきたいですね。下準備として、各ターンを調整できるようにしました。そして最短をかこうとして気づいたのですが、まだゴール処理をしていなかったので、追加しなくてはですね。
そういえば、昨日は東日本大会でしたね。今年は参加できなかったので、適当に競技結果を見たりできたてのシミュレータで迷路を走らせてみたりしてました。やはり上位勢の吸引機は速いですね。サーキットもレベルが上がっているように見えます。ちなみに自分の経路の結果はこちらです。皆さんはどこのルートを通ったのでしょうか。

2018クラシック東日本
さて、今月末が学生大会ですね。とりあえず学生大会の目標としては、クラシックで斜め最短を決めることですかね。そのためには安定した探索をできることと、斜め走行時の制御を作り上げるところが重要になってくるかな、と思います。まあとりあえず今は、最短をできるようにしたいと思います。
今日はこの辺で。
登録:
コメント (Atom)