もちもち4号の紹介記事です。
・概要
4作目のマウスです。昨年機の改良版で、より速く安定して走れることを目標に制作しました。
・戦績
金沢草の根大会 リタイア
学生大会 クラシック3位 特別賞受賞 サーキット2位
全日本大会 クラシック競技18位 ベストジュニア賞受賞
・テクニカルデータ
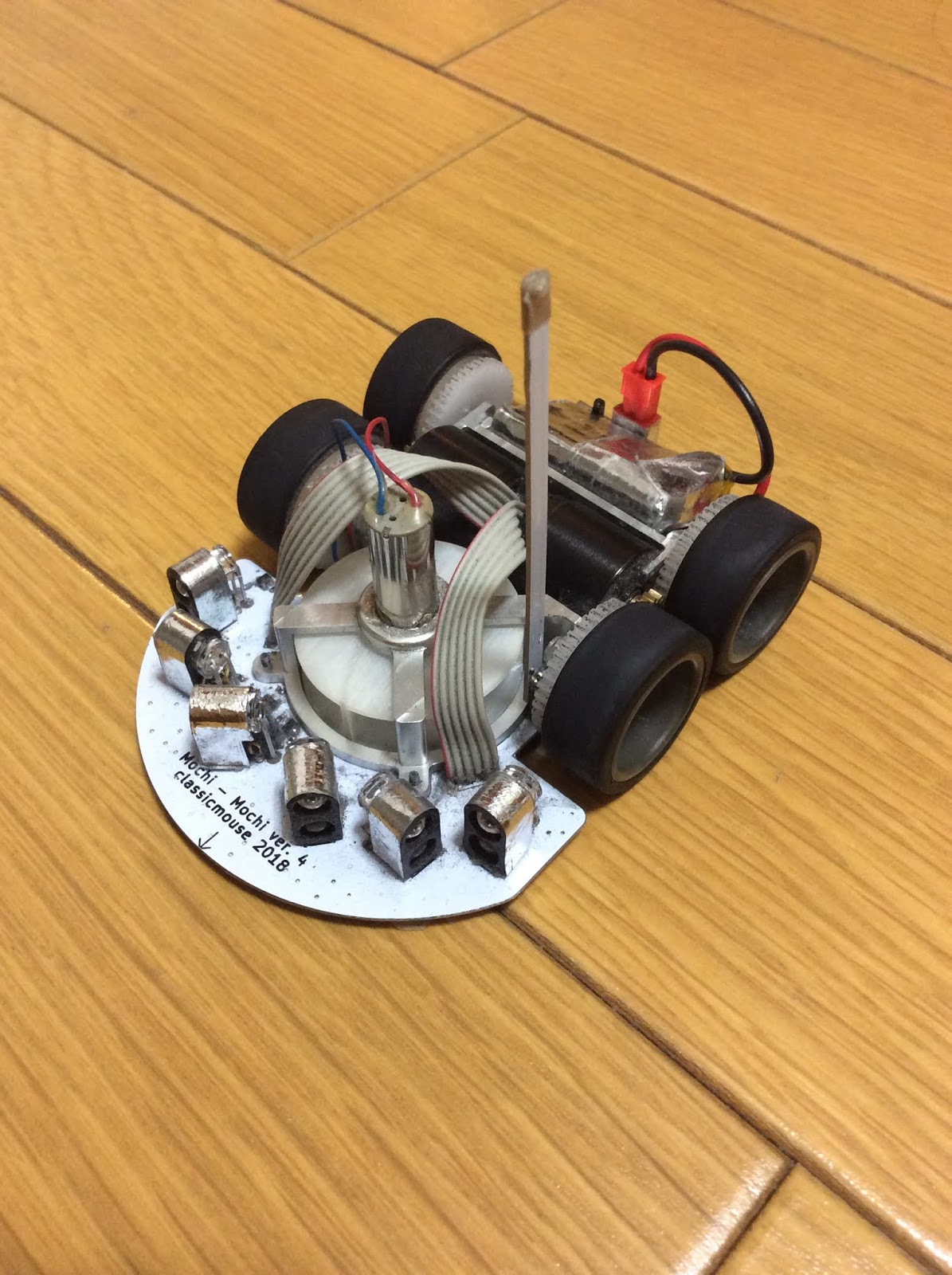
機体名 もちもち4号
サイズ 98(L)*71(W)*34(H)
重量 103g
マイコン RX631 96MHz
バッテリー Hyperion G5 120mAh 1cell*2(自作)
モーター 1717-003SR(駆動用) GB358(吸引用 もとはドローン用のもの)
エンコーダ IE2-1024
ジャイロセンサ MPU-9250
モータードライバ TB6612FNG
壁センサ SFH4550+ST-1KL3A
・特徴
ハードウェア
・アルミフレーム
昨年のアクリル製モーターマウントでは強度が足りないので、今回はアルミ製にしました。これは知能ロボコンで頂いた副賞で株式会社日南さんに削り出しをしてもらいました。剛性はもちろん見た目もよく、気に入っています。
・センサを6個に変更
探索の安定性向上を狙って真横センサを初採用してみました。結果としては探索時の壁読み、壁切れの性能はとても良いように思います。特に今回は斜めセンサが探索中に使いずらいケースがあったので、あって良かったように思います。
ただ、4個センサでも角度が浅ければ問題ないようにも思います。
・軽量化
スパーギアをステンレス製→POM製、ジャイロをモジュール→IC単体、バッテリーも軽いものを使用、などの変更により、センサが増えフレームがアルミになりましたが昨年よりかなり軽くなっています。やはりステンレスギアは重すぎます。
ソフトウェア
・探索法、経路導出の改善
今回の機体の1番の収穫だと思います。これまで手をつけてこなかった探索と経路導出のアルゴリズムをようやく大きく変えました。これまでは往復足立法+歩数最短しか出来ませんでしたが、今回から全面探索+ダイクストラ法ベースの経路導出が出来るようになりました。これでマシンのパラメータに応じた経路設定まで出来るようになりました。細かいところもそこそこ考慮しており、4マスゴールの処理などを行い、ゴールせずに探索終了する仕様や、斜めゴールも可能になっています(その代わり1マスゴールに対応していなかったり、探索でゴールしない迷路で最短をミスると記録がリタイアになったりする良くない仕様も付いていますが…)。
・データフラッシュ
が出来るようになったので電源切っても迷路データ残せるようになりました。ただもう少し活用したい印象です。
・台形加速→ネイピア加速
…導入したは良いですが性能に結び付いているかよくわかりません。シグモイド関数を元に作ってみましたが、もう少しよく考えないとダメそうです。
・問題点
ハードウェア故障多発
モーターのノイズがジャイロに乗る、ピニオンが薄すぎてロックタイト+メタルロックで止めても固定が外れる、アクリル製のホイールが割れる、などいつになくハードに苦しめられたように思います。この辺は経験則も大きいと思いますが、攻めた設計は作戦や理論的裏付けがないとただの無茶になってしまうのだと痛感しました。
4輪接地が出来ていない
上記のと少しかぶりますが、シャフトがM2でネジであること、間にあるシムリングが薄く歪むことなどから走らせていくうちに接地が不安定になってしまいます。マウントの剛性は十分でしたがホイール周りがダメでした。やたら右の後輪だけタイヤが削れていました。最短が不安定なのも全日本の本番で探索失敗したのはこのせいだと思います。特にシーズン終盤は最悪で180度の超信地旋回で機体が5mmほど横方向にずれます。この機体の最大の問題点です。
燃費が悪い
バッテリーが120mAhと吸引機なのに小さいものを使ったので、燃費が最悪です。吸引の機体なら、200mAhは欲しいところです。
制御が甘い
基本的に理論が良くわからなく適当なフィードバックメインで走ることしかできないので高速走行がうまくいきません。上記のハードの問題もあってポテンシャルはありそうだったのですが結果的にはあまり速くなりませんでした。未だにセンサの扱い(斜めの制御とか…)が確立されていないです。まだ土台がしっかりしていないことを今シーズンで実感しました。
・パラメータ
全日本5走目(MAX)
最高速 3.7m/s(str)、3.0m/s(diag)
加速度 15.5m/ss
ターン
big90 1.5m/s
in45(str to diag) 1.3m/s
out45(diag to str) 1.4m/s
v90 1.3m/s
in135(str to diag) 1.3m/s
out135(diag to str) 1.3m/s
180 1.3m/s
・コメント
これまでのマウスで一番時間をかけ、動き出しも早かったマウスでしたが、シーズンを通してなかなか挙動が安定せず、苦戦した機体でした。苦労してしんどい思いをするとともに、上位勢のしっかりした走りからはまだまだ遠く、自分の知識や経験の少なさを感じた機体でした。今後は壊れない機体を作りたいです。制御も勉強したいです。
とはいえ、大会の結果としては、学生大会で念願の3位入賞を果たし、全日本でも初めてMAXパラメータで走ることができ、とても良く頑張った機体でした。なぜかは知りませんが、この機体は他人が見ていると良く動くという謎の特徴を持っています(普通逆では…)。それはなんだかんだいってこれまで中高の4年間で技術やノウハウが蓄積された結果なのかなあと。今後の改善点は多く見つかりましたが、高校生の最後にふさわしいマウスは作れたと思います。
この記事はこの辺で。