
2台
まず、今年のハーフマウス、もちもち2号です。

現状は、モード切り替え、センサのA/D変換及びその値の表示、バッテリーチェック、割り込みによるモーターの正転と逆転などができています。とりあえず基板のミスは上記のこと以外はなさそうなのでよかったです。
今作はコードが物理的にとても綺麗なので良いです。あと重さも360g位なので、これまで作ってきたロボットの中では最軽量です(と言ってもハーフマウスの中ではかなり重量級です、頭がおかしくなりそうです)。センサ周りが不安ですが、動いてくれることを祈ります。
これから去年のプログラムを参考にして書いていこうと思います。次は加速、姿勢制御などでしょうか、で、それが出来たら探索ですね。
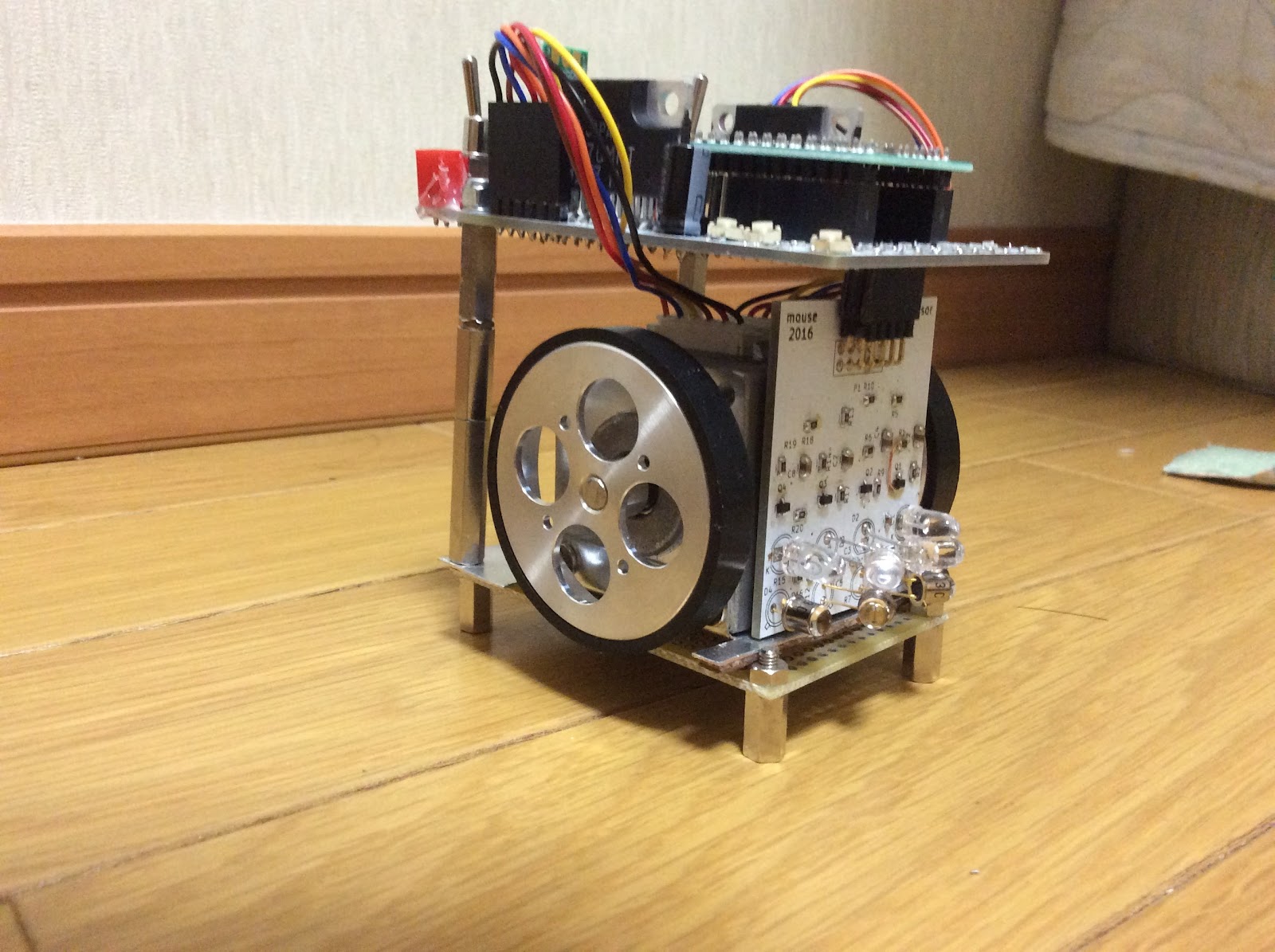
次に、今年の先端ものづくりチャレンジin習志野に出る(と思われる)車体(名前が決まっていない)です。


今日、一気に進めてここまで来ました。こっちは時間があるかわからないので、ガッツリ去年のプログラムを移植してしまおうと思います。去年より格段に早くボールを集めていって欲しいですね…。
とりあえずアームのセンサ回路がテストできていないのでしたいですね。モーターは動きました。さて、間に合うのでしょうか。
ハードを仕上げてソフトに切り替えて、勢いをさらにつけたいですね。
今日はこの辺で。
0 件のコメント:
コメントを投稿