さて、前回加速が出来たとか書いたわけですが、出来ていませんでした。
割り込みのあたりで、なんか去年の知ロボの時、ミスとなる穴を作っていたのです。台形加速の式が若干違う、という状態でしばらく苦戦しました。2日かけて直しました。
まぁいろいろ書いて書いて探索がまともに出来ている(?)みたいなプログラムは出来ました。それっぽい動きもしています。ただ、迷路が諸事情にて手元にないので調整はできません(泣)。
次は知ロボのを書くか、最短書くかですかね。
今日はこの辺で。
2016年8月29日月曜日
2016年8月27日土曜日
ソフト始動
そろそろ8月が終わってしまいますね。そしてこのブログ書き始めてからほぼ1年経ったわけですね。早いですね。
それはそうと、ハーフマウスの進捗を報告します。とりあえず、加減速と姿勢制御は出来ました。足立法も入れましたが、まだ調整していないので、大枠ができた程度です。とはいえどまぁ良いペースですね。
inrofはファンがマイコン駆動で回せたわぁいみたいな感じです。え、間に合うのか?はは、そんな間に合いますよははは(棒読み)。冗談はさておき、センサ回路確認してとっとと移植をしたいですね。
とりあえずソフトの基礎固めに注力していきたいですね。
今日はこの辺で。
2016年8月25日木曜日
今シーズン後半の車体達、完成
これが自分の本気だと言わんばかりに馬力を出し、新作2台、完成させました。



今週の月曜で基板を完成させ動作確認を行いました。すると、あれ、LEDが1つ動かない…と思っていたら基板のデータミスで、配線が1本されていませんでした。GNDとかではなかったので、エナメル線を追加して対処しました。
現状は、モード切り替え、センサのA/D変換及びその値の表示、バッテリーチェック、割り込みによるモーターの正転と逆転などができています。とりあえず基板のミスは上記のこと以外はなさそうなのでよかったです。
今作はコードが物理的にとても綺麗なので良いです。あと重さも360g位なので、これまで作ってきたロボットの中では最軽量です(と言ってもハーフマウスの中ではかなり重量級です、頭がおかしくなりそうです)。センサ周りが不安ですが、動いてくれることを祈ります。
これから去年のプログラムを参考にして書いていこうと思います。次は加速、姿勢制御などでしょうか、で、それが出来たら探索ですね。
次に、今年の先端ものづくりチャレンジin習志野に出る(と思われる)車体(名前が決まっていない)です。


なんかハーフマウスに比べてかなりごちゃごちゃした印象です。
今日、一気に進めてここまで来ました。こっちは時間があるかわからないので、ガッツリ去年のプログラムを移植してしまおうと思います。去年より格段に早くボールを集めていって欲しいですね…。
とりあえずアームのセンサ回路がテストできていないのでしたいですね。モーターは動きました。さて、間に合うのでしょうか。
ハードを仕上げてソフトに切り替えて、勢いをさらにつけたいですね。
今日はこの辺で。

2台
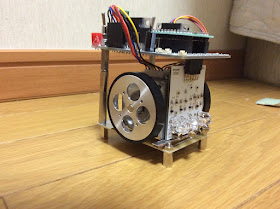
まず、今年のハーフマウス、もちもち2号です。
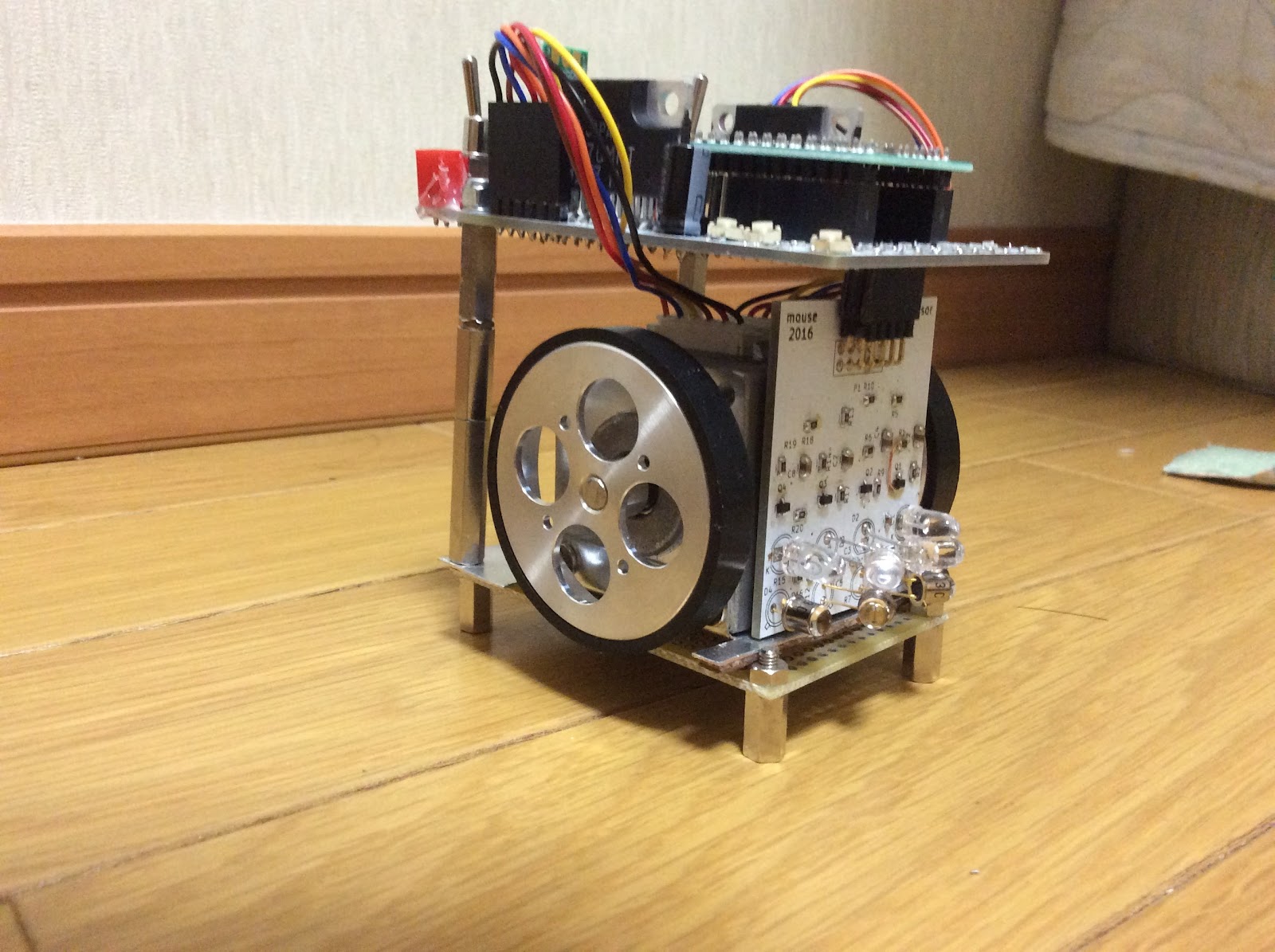

現状は、モード切り替え、センサのA/D変換及びその値の表示、バッテリーチェック、割り込みによるモーターの正転と逆転などができています。とりあえず基板のミスは上記のこと以外はなさそうなのでよかったです。
今作はコードが物理的にとても綺麗なので良いです。あと重さも360g位なので、これまで作ってきたロボットの中では最軽量です(と言ってもハーフマウスの中ではかなり重量級です、頭がおかしくなりそうです)。センサ周りが不安ですが、動いてくれることを祈ります。
これから去年のプログラムを参考にして書いていこうと思います。次は加速、姿勢制御などでしょうか、で、それが出来たら探索ですね。
次に、今年の先端ものづくりチャレンジin習志野に出る(と思われる)車体(名前が決まっていない)です。


今日、一気に進めてここまで来ました。こっちは時間があるかわからないので、ガッツリ去年のプログラムを移植してしまおうと思います。去年より格段に早くボールを集めていって欲しいですね…。
とりあえずアームのセンサ回路がテストできていないのでしたいですね。モーターは動きました。さて、間に合うのでしょうか。
ハードを仕上げてソフトに切り替えて、勢いをさらにつけたいですね。
今日はこの辺で。
2016年8月18日木曜日
基板キタァ
届きました!!

嬉しいです。白いです。嬉しいです。
5枚発注しましたが、おまけで7枚ずつ来ました。とすると1枚200円くらいですね。安い…。
早く回路を完成させたいですね。動くかな…。
あと、inrofの進捗。

とりあえず2枚目完成です。電源は出ているようですがステッパーが今手元にないのでモータードライバのテストはまた後日しようと思います。
とりあえず、マウスをガンガン進めたいですね!
今日はこの辺で。

嬉しいです。白いです。嬉しいです。
5枚発注しましたが、おまけで7枚ずつ来ました。とすると1枚200円くらいですね。安い…。
早く回路を完成させたいですね。動くかな…。
あと、inrofの進捗。

とりあえず、マウスをガンガン進めたいですね!
今日はこの辺で。
2016年8月13日土曜日
メール来ました
elecrowさんから基板ができたという趣旨のメールが来ました。良いですね。写真も付いていて、ちゃんとシルクが印刷されている事が確認できるので、親切で助かります。
inrofの進捗を少し。モータードライバとDCDCと電圧計を積んだ回路を作り始めました。
いろいろあってどうしても進捗が生まれにくい状況ですが、まぁ少しずつ、やれるところからやっていきましょうか。
今日はこの辺で。
inrofの進捗を少し。モータードライバとDCDCと電圧計を積んだ回路を作り始めました。
いろいろあってどうしても進捗が生まれにくい状況ですが、まぁ少しずつ、やれるところからやっていきましょうか。
今日はこの辺で。
2016年8月7日日曜日
基板発注
今日、基板発注をしました。
いろいろチェックしましたが、上手くいっているかは知りません。elecrowに発注しました。
センサ基板とマイコンボードの2種類を5枚ずつ発注しました。送料込みで3000円ちょいくらいだったので安いですね。1枚300円くらいと考えると、安すぎです。
今は祈るのみですね…笑。
今日はこの辺で。
いろいろチェックしましたが、上手くいっているかは知りません。elecrowに発注しました。
センサ基板とマイコンボードの2種類を5枚ずつ発注しました。送料込みで3000円ちょいくらいだったので安いですね。1枚300円くらいと考えると、安すぎです。
今は祈るのみですね…笑。
今日はこの辺で。
Maker Faire Tokyo 2016に行ってきました
8/6(土)に、Maker Faire Tokyo 2016に行ってきました。

いろいろものづくり関係の展示やデモが見れて良い刺激になりました。
会場には10:20頃に到着したのでほぼ先頭ですぐに入れました。その後、様々な展示を見たので、印象に残っているものを書いていこうと思います。
・オリジナルマインドさんの展示
CNCなどの金属加工系のものが展示してありました。


 金属加工を手加工でやるとズレが出たり時間がかかったりすることがあるので、導入したいと思いました。あの曲げる機構は凄いです。
金属加工を手加工でやるとズレが出たり時間がかかったりすることがあるので、導入したいと思いました。あの曲げる機構は凄いです。
・ロボコンマガジンさんの展示
マイクロマウスをやっていました。初めて、板マウスに触ることができました。実際の走行も見れて、面白かったです。RTさんが発売する、RX631マイコンボードも気になりました。
・レーザー加工機、3Dプリンターの展示
僕たちが日頃使うものではないですが、なかなか面白かったです。使ってみたいですが、使う機会があるかな…。
そんな感じです。面白かったです。マイクロマウスのモチベーションが上がりました。小さいロボットも多かったので。また行きたいです。
この記事はこの辺で。

いろいろものづくり関係の展示やデモが見れて良い刺激になりました。
会場には10:20頃に到着したのでほぼ先頭ですぐに入れました。その後、様々な展示を見たので、印象に残っているものを書いていこうと思います。
・オリジナルマインドさんの展示
CNCなどの金属加工系のものが展示してありました。



・ロボコンマガジンさんの展示
マイクロマウスをやっていました。初めて、板マウスに触ることができました。実際の走行も見れて、面白かったです。RTさんが発売する、RX631マイコンボードも気になりました。
・レーザー加工機、3Dプリンターの展示
僕たちが日頃使うものではないですが、なかなか面白かったです。使ってみたいですが、使う機会があるかな…。
そんな感じです。面白かったです。マイクロマウスのモチベーションが上がりました。小さいロボットも多かったので。また行きたいです。
この記事はこの辺で。
2016年8月3日水曜日
新作、おおよそ完成
ブログ書いといてよかったと思います。今日は計画的に作業できました。
ということで、新作です(回路は出来てないですが…)。


今回の新たな技術(?)はナイロンナットですね。あれは便利ですね。キッチリ締まります。締結する時にやや力がいるのが面倒なだけで、それを除けば使いやすいです。
とっとと回路仕上げて去年のプログラム移植して動かしたいですね。
ただその前に、基板発注しないと。基板のデータはあと少しで出来上がります。発注、上手くいくといいですね…。初めてですが頑張っていこうと思います。
今日はこの辺で。
ということで、新作です(回路は出来てないですが…)。

新作

アングル変えて
高さ高いですね。高い。うん、高い。幅は去年より短く、長さは去年とほぼ同じかやや小さいかくらいですが、高さがやはり高いです。今回の新たな技術(?)はナイロンナットですね。あれは便利ですね。キッチリ締まります。締結する時にやや力がいるのが面倒なだけで、それを除けば使いやすいです。
とっとと回路仕上げて去年のプログラム移植して動かしたいですね。
ただその前に、基板発注しないと。基板のデータはあと少しで出来上がります。発注、上手くいくといいですね…。初めてですが頑張っていこうと思います。
今日はこの辺で。
2016年8月2日火曜日
ブログと進捗
また放置していました。すみません。書く気力がどうも起きなかったもので…。
えっと、とりあえずこれまでの進捗を整理しましょうか。
inrof
時間の流れに沿っていくと、まずマイコンとかLEDとかMOSFETとかブザーとか詰んだ回路が出来ました。

そういえば今年のコンセプト(?)みたいなものを言ったか言ってないかよく覚えていないので言っておくと、吸引と距離センサを3つ使った効率の良い探索、またそれを複数台協調することでより速くした上で、なんかネタを仕込もうと思っています。ネタはまだ考え中です。

KiCadのベタグランドと奮闘しています。あとはビアをガンガン付けてシルクでお絵描きすれば完成です。そろそろ発注しないとかなりまずいと思うので、頑張りたいと思います。
動いている車体が目の前にないからでしょうか、モチベーションが進捗があっても下がったりしています。進捗がないような錯覚がしますが、書き出してみると結構頑張っているなと思っています。なかなか面白いものですね。去年に、新しいものが来ると進捗がうまれた錯覚がすると言ったような気がします。本当にそうで、目に見えるのはロボットだけで、その努力は自分でも分からなくなることがあります。だから、文字で整理をするのですね。ブログを放置すると、いまいち自分の現状が掴みにくくなるもので、それで精神を無駄に削っていたのかもしれないと思うと(さすがに大げさですね、そんなことはないですが)、改めてブログの価値を感じざるをえないですね。
そういえば、また1シーズンに2つのロボットを作っていますね。笑ってしまいそうです。去年無理だって反省しただろうと。ただ、inrofなんて特にあすなろ賞を貰った上に班員のやる気が高いから、自分もやりたいと思うわけで、結局2つやっているわけです。これがどういう結果になるかは今は読めません。ただ、ブログと、これまでで身に付けてきた技術をうまく使いこなして、効率よくロボットを動かしたいな、と思っています。
明日中にアルミとKiCadは仕上げたいですね…。
今日はこの辺で。
えっと、とりあえずこれまでの進捗を整理しましょうか。
inrof
時間の流れに沿っていくと、まずマイコンとかLEDとかMOSFETとかブザーとか詰んだ回路が出来ました。

inrof用のマイコンボード(仮)
その後今度はちゃんと設計をして車体を作っていきました。現状、あとはサーボ、吸引機構周りの加工と、カラーセンサ回路、ボール確認センサ回路、それとDCDCとモータードライバを詰んだ回路を作り、距離センサ用にアルミを3枚作れば完成です(ウッ、工数が多いですね…)。とりあえず距離センサのアルミ板→アーム加工→回路という順でやるのが最適と考えています。本当に最適かは知りません。そういえば今年のコンセプト(?)みたいなものを言ったか言ってないかよく覚えていないので言っておくと、吸引と距離センサを3つ使った効率の良い探索、またそれを複数台協調することでより速くした上で、なんかネタを仕込もうと思っています。ネタはまだ考え中です。

ハーフの現状と一緒に
ハーフマウスKiCadのベタグランドと奮闘しています。あとはビアをガンガン付けてシルクでお絵描きすれば完成です。そろそろ発注しないとかなりまずいと思うので、頑張りたいと思います。
動いている車体が目の前にないからでしょうか、モチベーションが進捗があっても下がったりしています。進捗がないような錯覚がしますが、書き出してみると結構頑張っているなと思っています。なかなか面白いものですね。去年に、新しいものが来ると進捗がうまれた錯覚がすると言ったような気がします。本当にそうで、目に見えるのはロボットだけで、その努力は自分でも分からなくなることがあります。だから、文字で整理をするのですね。ブログを放置すると、いまいち自分の現状が掴みにくくなるもので、それで精神を無駄に削っていたのかもしれないと思うと(さすがに大げさですね、そんなことはないですが)、改めてブログの価値を感じざるをえないですね。
そういえば、また1シーズンに2つのロボットを作っていますね。笑ってしまいそうです。去年無理だって反省しただろうと。ただ、inrofなんて特にあすなろ賞を貰った上に班員のやる気が高いから、自分もやりたいと思うわけで、結局2つやっているわけです。これがどういう結果になるかは今は読めません。ただ、ブログと、これまでで身に付けてきた技術をうまく使いこなして、効率よくロボットを動かしたいな、と思っています。
明日中にアルミとKiCadは仕上げたいですね…。
今日はこの辺で。